





28BYJ-48 5 Wire DC 5V Unipolar Stepper Motor
₹89.00 (incl. GST)
In stock
Additional Information
✅ Free Shipping on Orders Above ₹999
✅ Items on Website is Ready Stock at our Store for Immediate Shipping
✅ Secure Checkout | Trusted Payments
✅ Estimated Delivery?
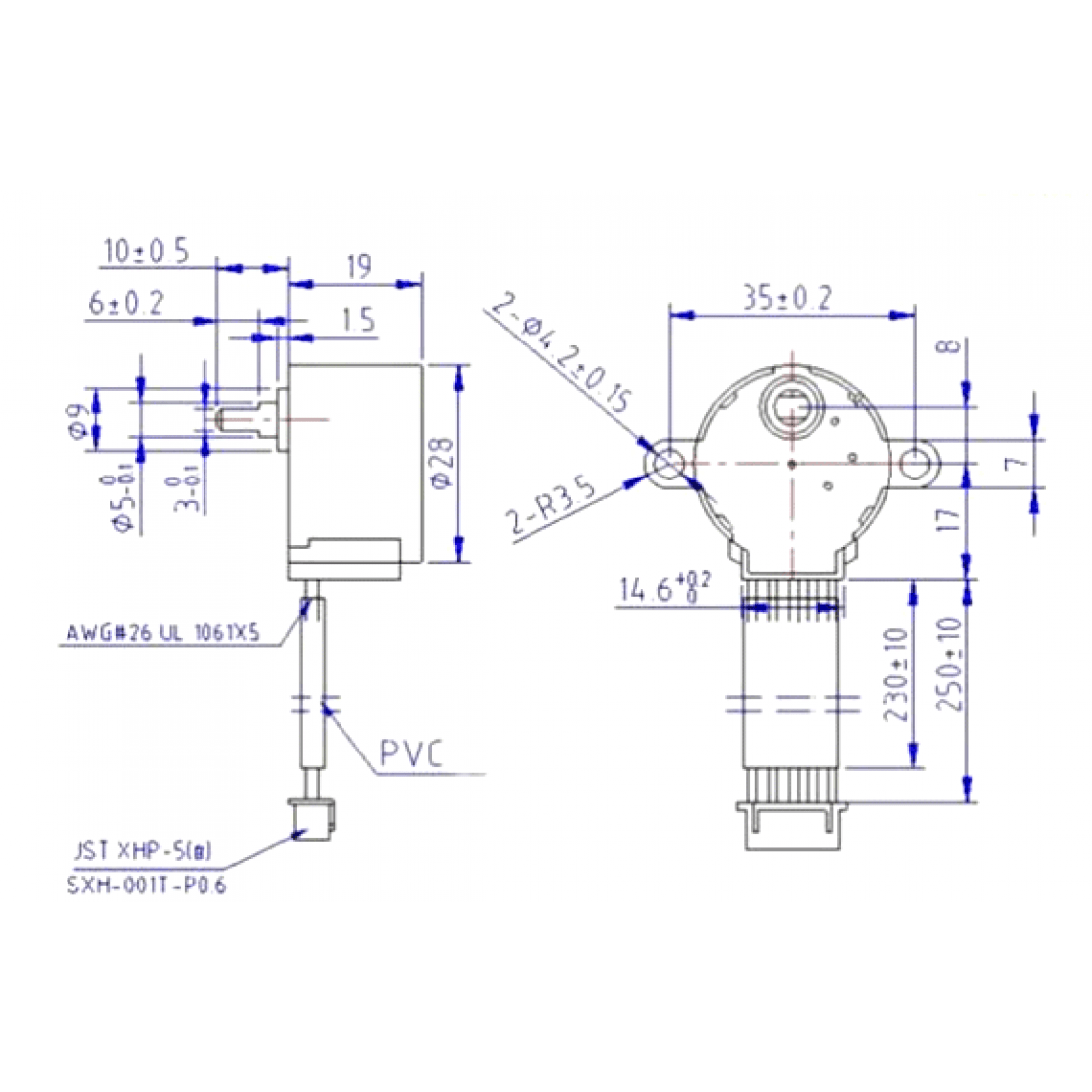
The most commonly used stepper motor is the 28BYJ-48 5 Wire DC 5V Unipolar Stepper Motor. You can find this (or similar) motors in your DVD drives, Motion camera and many more place. The motor has a 4 coil unipolar arrangement and each coil is rated for +5V hence it is relatively easy to control with any basic microcontrollers. These motors has a stride angle of 5.625°/64, this means that the motor will have to make 64 steps to complete one rotation and for every step it will cover a 5.625° hence the level of control is also high.
However, these motors run only on 5V and hence cannot provide high torque, for high torque application you should consider the Nema17 motors. So if you are looking for a compact easy to use stepper motor with decent torque then this motor is the right choice for you.
These stepper motors consume high current and hence a driver IC like the ULN2003 is mandatory. The main purpose of ULN2003 is to amplify the control signals from the Arduino, so as to drive the 28BYJ-48 Stepper Motor. If you will give the ULN2003 stepper driver a certain pulse signal, it will drive step motor to a certain angle. The control of Stepper Motor movement angle is done by controlling the number of stepper motor driver pulses. The speed of the stepper motor rotation is also controllable by controlling the frequency of the pulses.
Connect the 28BYJ-48 motor with the ULN2003 motor driver then interface this combination of motor and driver with Arduino, do some coding and your 28BYJ-48 Stepper Motor is ready to listen to your commands!!!
Features :
- Stepper motor with a standard interface, when used directly pluggable.
- A, B, C, D four-phase LED indicator which indicates the status of the stepper motor work.
- Compact size stepper motor perfect for small robotics applications.
- Self-positioning Torque:>34.3mN.m
- Rated Voltage::5VDC
- Reduction ratio: 64:1
- Step Angle:5.625° /64
- Frequency (Hz):100
- Friction torque (gf.cm):600-1200
- Pull-in torque (gf.cm):300
Applications:
- CNC machines
- Precise control machines
- Security cameras
- DVD Players
- Car side mirror tilt
Package Includes :
- 1 x 28BYJ-48 Stepper Motor
1 review for 28BYJ-48 5 Wire DC 5V Unipolar Stepper Motor
Add a review
Related products






Jose Menachery –
Received product which I ordered in good condition. Satisfied with techtonics